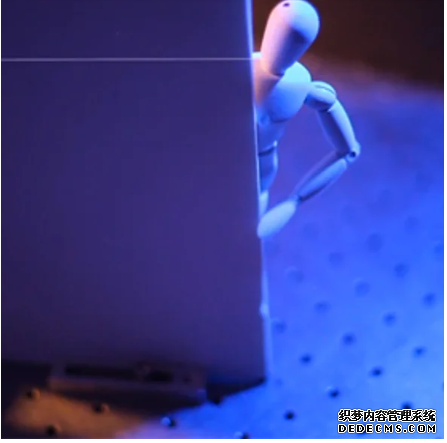
在危险或难以接近的地方,如装有活动部件的机器内部或高度污染的地区,能够看到隐藏在墙后的物体的能力可能是无价的。现在,位于剑桥的麻省理工学院的科学家们找到了一种方法来做到这一点。
他们向隐藏场景远侧的墙壁发射激光脉冲,并记录散射光到达相机的时间。光子从壁上反弹到隐藏的物体上,然后又回到壁上,每次散射,直到一小部分最终到达相机,每个时间都略有不同。正是这种时间分辨率提供了揭示隐藏几何图形的关键。50飞秒(即50千万亿分之一秒)激光脉冲的位置也改变了60次,以获得隐藏场景的多个视角。
“我们都熟悉声音的回声,但我们也可以利用光的回声,”麻省理工学院媒体实验室(MIT Media Lab)相机文化研究小组负责人拉梅什·拉斯卡尔(Ramesh Raskar)说。
普通相机只能看到正前方的物体。光线从直接视线以外到达传感器时太过分散,无法传递有关隐藏场景的有用信息,因为光线已经被多次反射散射。今天发表在《自然通讯》(Nature Communications1)杂志上的新装置通过捕捉超快飞行时间信息(即每个光子到达相机所需的时间)克服了这个问题。该信息通过Andreas Velten提出的重构算法进行解码。
利用散射
大多数超高速成像技术的目标是减轻散射光的影响,只聚焦于到达传感器的第一批光子。拉斯卡尔说,这里的不同之处在于,“我们实际上利用了散射光”。
照相机确实赢得了超高速的标签。它可以每2皮秒记录图像,光传播0.6毫米的时间。因此,它可以以亚毫米的精度记录每个光子所走的距离。
其中一个重大的技术挑战是,在拍摄到隐藏场景的不同部分后,从经过相同距离、到达相机相同位置的光子中分离出信息。
计算机通过比较不同激光位置产生的图像来克服这种复杂性,从而估计出目标的可能位置。虽然光子从一个激光位置击中隐藏场景的不同部分可能是相同的,但是它们与另一个激光点的总距离不同。“整体的数学技术,”Raskar解释说,“类似于x射线cat扫描中使用的计算机断层扫描。”
目前,整个过程需要几分钟,但研究人员希望在未来,它将减少到不到10秒。
相关阅读:杏耀平台,料垃圾化学制品吸引饥饿的海鸟
相关阅读:杏耀注册,如何最大限度地利用假期销售